MECATRONICA
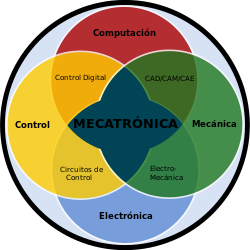
La ingeniería mecatrónica es una disciplina que une la ingeniería mecánica, ingeniería electrónica, ingeniería de control eingeniería informática, y sirve para diseñar y desarrollar productos que involucren sistemas de control para el diseño de productos o procesos inteligentes, lo cual busca crear maquinaria más compleja para facilitar las actividades del ser humano a través de procesos electrónicos en la industria mecánica, principalmente. Debido a que combina varias ingenierías en una sola, su punto fuerte es la versatilidad. Un consenso común es describir a la mecatrónica como una disciplina integradora de las áreas de mecánica, electrónica einformática cuyo objetivo es proporcionar mejores productos, procesos y sistemas. La mecatrónica no es, por tanto, una nueva rama de la ingeniería, sino un concepto recientemente desarrollado que enfatiza la necesidad de integración y de una interacción intensiva entre diferentes áreas de la ingeniería. Con base en lo anterior, se puede hacer referencia a la definición propuesta por J. A. Rietdijk: "Mecatrónica es la combinaciónsinérgica de la ingeniería mecánica de precisión, de la electrónica, del control automático y de los sistemas para el diseño de productos y procesos", la cual busca crear maquinaria más compleja para facilitar las actividades del ser humano a través de procesos electrónicos en la industria mecánica principalmente. Existen, claro está, otras versiones de esta definición, pero ésta claramente enfatiza que la mecatrónica está dirigida a las aplicaciones y al diseño.
Por otro lado, más allá de las cuestiones técnicas, la mecatrónica también se ha adoptado como una disciplina científica aplicada, en la cual se hace modelado, análisis, síntesis y control de sistemas de naturaleza multidominio y se ha tratado de homogeneizar la ciencia para este tipo de sistemas. Algunos ejemplos de aspectos teóricos cuyo objeto de estudio son los sistemas mecatrónicos desde un enfoque abstracto son el modelado por "bond graph", los sistemas hamiltonianos con puertos, las técnicas de control basadas en la energía como lo es el moldeo de energía, el diseño óptimo de estructura y control, y más recientemente a un grado más de integración como lo son los sistemas híbridos.

- Diseñar, construir e implementar productos y sistemas mecatrónicos para satisfacer necesidades emergentes, bajo el compromiso ético de su impacto económico, social, ambiental y político.
- Generar soluciones basadas en la creatividad, innovación y mejora continua de sistemas de control y automatización de procesos industriales.
- Apoyar a la competitividad de las empresas a través de la automatización de procesos.
- Evaluar, seleccionar e integrar dispositivos y máquinas mecatrónicas, tales como robots, tornos de control numérico, controladores lógicos programables, computadoras industriales, entre otros, para el mejoramiento de procesos industriales de manufactura.
- Dirigir equipos de trabajo multidisciplinario.
La mecatrónica tiene como antecedentes inmediatos a la investigación en el área de cibernética realizada en 1936 por Alan Turing, en 1948 por Norbert Wiener y Morthy, las máquinas de control numérico, desarrolladas inicialmente en 1946 por George Devol, los manipuladores, ya sean teleoperados, en 1951 por Goertz, o robotizados, en 1954 por Devol, y los autómatas programables, desarrollados por Bedford Associates en 1968.
En 1969, Tetsuro Mori, ingeniero de la empresa japonesa Yaskawa Electric Co., acuña el término mecatrónica, y en 1971 se le otorga el derecho de marca. En 1982 Yaskawa permite el libre uso del término.
En los años setenta, la mecatrónica se ocupó principalmente de la tecnología de servomecanismos usada en productos como puertas automáticas, máquinas automáticas de autoservicio y cámaras "auto-focus". En este enfoque pronto se aplicaron métodos avanzados de control. En los años ochenta, cuando la tecnología de la información fue introducida, los ingenieros empezaron a incluir microprocesadores en los sistemas mecánicos para mejorar su desempeño. Las máquinas de control numérico y los robots se volvieron más compactos, mientras que las aplicaciones automotrices como los mandos electrónicos del motor y los sistemas anticerrado y frenando se hicieron extensas. Por los años noventa, se agregó la tecnología de comunicaciones, creando productos que podían conectarse en amplias redes. Este avance hizo posibles funciones como la operación remota de manipuladores robóticos. Al mismo tiempo, se están usando novedosos microsensores y microactuadores en nuevos productos. Los sistemas microelectromecánicos como los diminutos acelerómetros de silicio que activan las bolsas de aire de los automóviles.
http://es.wikipedia.org/wiki/Ingenier%C3%ADa_mecatr%C3%B3nica

